Robotic Orthognathic Surgery: Proof of concept preliminary study
Authors: Ahmad M. AlAli1 , Hamidreza Khodashenas2 , Erfan Askarzadeh2 , Amir Hooshiar2 , David A Koppel1
1 : Department of Oral and Maxillofacial Surgery, McGill University Health Centre, Montreal, Québec, Canada 2 : Surgical Robotics Centre McGill University Health Centre, Montreal, Québec, Canada
Introduction: To date most robotic surgery has utilised surgeon-controlled machines that allow for minimally invasive surgery rather than a robot moving autonomously. We are testing a robotic device that allows for the automatic position in space, of bone fragments or segments. We believe this will have applications for trauma and orthognathic surgery. The technology will also be applicable to other surgical specialities.
Objective: This is a proof-of-concept trial to test the application of the technology for orthognathic surgery in 3D printed models.
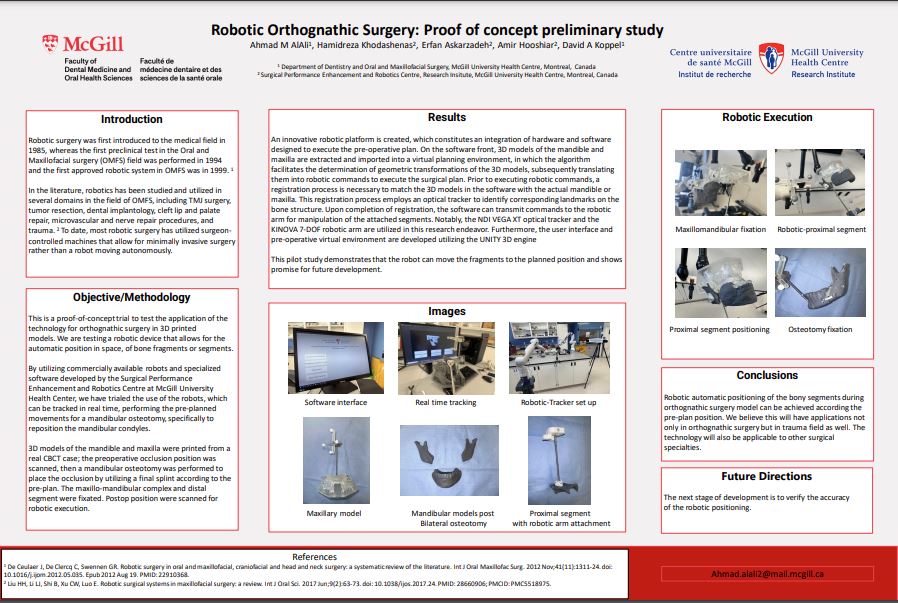
Methodology: Utilising commercially available robots and specialised software developed by the Surgical Performance Enhancement and Robotic Centre (SuPER) we have trialed the use of the robots, which can be tracked in real time, performing the pre-planned movements for a mandibular osteotomy.
Results: The pilot study demonstrates that the robot can move the fragments to the planned position and shows promise for future development. Future studies: The next stage of development is to verify the accuracy of the robotic positioning.