Project Goals
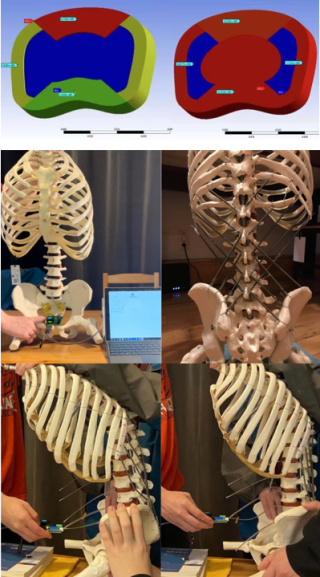
1. To design and fabricate a biomimetic prototype of vertebral discs with a provision for inbuilt sensor integration for pressure measurement via data-driven reverse-engineering design.
2. To design and fabricate a biomimetic thoracolumbar fascia (large network of connective tissue) to yield tensile pre-stress and distribute the loading of the spinal column throughout the pelvic, lumbar, and thoracic regions via a tensegrity-based spring network.
Team
Client: Prof. Mark Driscoll
Academic advisors: Prof. Mark Driscoll and Prof. Natalie Reznikov
Mechanical engineering students: Jinbang Huang, Yiyang Mu, Purui Chen, and Chang He
Bioengineering students: Emilie Xiao, Olivia Skipper, and Sarah Jurchuk
Awards
McGill Design Day 2021, 1st Place Winner Design Day Medical Technology Award
Team Voice
"This project has been a really unique and fulfilling experience; winning 1st place in MedTech is an honour!
Working virtually and in such a large team had its challenges. The virtual school year meant that we could only access the lab in late March, and even then, with restrictions. Much of the construction and testing of the prototype was done in our living rooms - we had to be flexible and adaptable in our methodologies. As a large and multidisciplinary group, we had to find effective methods to communicate ideas to best leverage our different skillsets.
In the end, we are really proud to have introduced two critical components of the spine in a very complementary manner. We are excited to see what’s to come for the Robotic Spine Model in future iterations of the project!
We would like to express great appreciation to our supervisors Prof. Mark Driscoll and Prof. Natalie Reznikov for their encouragement and guidance."